Controlador industrial compatible con TANGO/FESA, este controlador multieje de hasta 12 canales, es compatible con motores DC y paso a paso vía Ethernet ó RS232 (cada eje directamente) con velocidades máximas de 35000 pasos/segundo y 800000 conteos de Encoder por segundo (DC).
Con entrada de encoder digital, tanto con control de lazo abierto como cerrado, este driver multieje proporciona posicionamiento de origen de gran precisión, ofrece compensación de pérdida de paso y de backlash. Compatible con Windows XP/Vista/7/8, Linux y Mac OS, se suministra con ejemplos de código para Visual Basic, C, C#, C++, Matlab y Labview, a través siempre de una interfaz xiLab fácil e intuitiva.
El driver o controlador industrial de movimiento 8SMC4-ETHERNET / RS232-B19 ha sido diseñado especialmente para controlar hasta 12 sistemas mecatrónicos basados en tecnologías estándar DC, Servo o Paso a Paso. La carcasa del controlador/driver puede montarse cómodamente en muebles industriales estándar de 19 pulgadas. Se pueden conectar varias cajas a través de un puerto Ethernet a través de una red simple. Y el sistema puede ser configurado automáticamente a través de un modo peer-to-peer sin necesidad para operar dde una infraestructura especial o de servidores maestros. Además, cada eje puede ser controlador a través de un puerto RS232 separado. El driver/controlador multieje 8SMC4-ETHERNET contiene todos los subsistemas necesarios, incluyendo: control, unidad de potencia, etc que soporta el trabajo simultáneo de todos los 8,10 ó 12 ejes.
El driver puede conectarse a un número determinado de estaciones de trabajo de base PC vía Ethernet. Todos los usuarios tienen acceso al rango de configuraciones de los ejes disponibles y asignación de privilegios de acceso.
Desde el punto de vista del programador, trabajar con todos los ejes del sistema es muy similar a trabajar con una unidad 8SMC4 de 1 solo eje.
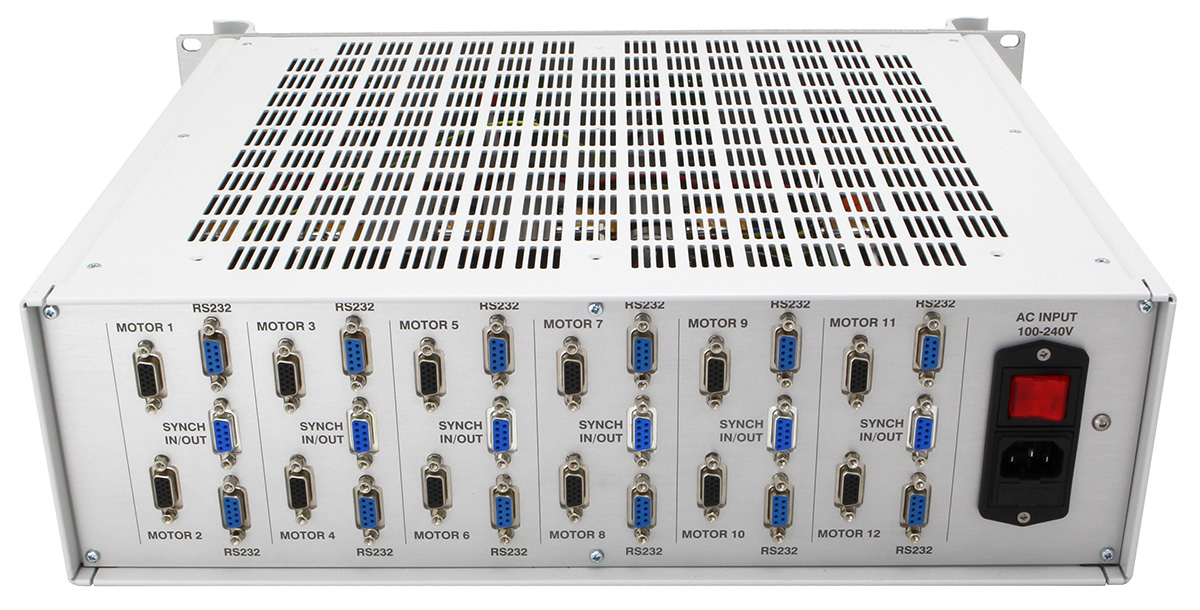
Este controlador industrial dispone de un panel frontal que contiene el indicador LED y de estatus, botones manuales, botón de interconexión del sistema y puerto Ethernet. En el panel trasero, hay conectores de motor y puertos RS232 separados para cada eje, conectores de sincronización I/O, un conector de potencia y un botón de apagado y encendido. El sistema se refrigera a través de ranuras de rejilla ubicadas en las paredes superiores e inferioress de la caja.











")

